题目内容
(请给出正确答案)
题目内容
(请给出正确答案)
[主观题]
试画出P、PI、PID控制器对偏差为阶跃输入变化的响应曲线。
 答案
答案
查看答案
 请输入或粘贴题目内容
搜题
请输入或粘贴题目内容
搜题
 拍照、语音搜题,请扫码下载APP
题目内容
(请给出正确答案)
拍照、语音搜题,请扫码下载APP
题目内容
(请给出正确答案)
答案
 更多“试画出P、PI、PID控制器对偏差为阶跃输入变化的响应曲线。”相关的问题
更多“试画出P、PI、PID控制器对偏差为阶跃输入变化的响应曲线。”相关的问题
第10题
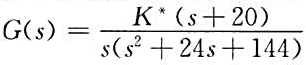
试画出K*值增大时的系统概略根轨迹图,并求出使系统产生振荡的K*的取值范围。