题目内容
(请给出正确答案)
题目内容
(请给出正确答案)
[主观题]
要确定立体模型在地面测量坐标系中的正确位置,则需要把相对定向所建立的立体模型进行平移、旋转和缩放,以便纳入到地面测量坐标系中,并归化到制图比例尺,这一过程称为 ()。
A.内定向
B.相对定向
C.绝对定向
D.影像定向
 答案
答案
查看答案
 请输入或粘贴题目内容
搜题
请输入或粘贴题目内容
搜题
 拍照、语音搜题,请扫码下载APP
题目内容
(请给出正确答案)
拍照、语音搜题,请扫码下载APP
题目内容
(请给出正确答案)
A.内定向
B.相对定向
C.绝对定向
D.影像定向
答案
 更多“要确定立体模型在地面测量坐标系中的正确位置,则需要把相对定向所建立的立体模型进行平移、旋转和缩放,以便纳入到地面测量坐标系中,并归化到制图比例尺,这一过程称为 ()。”相关的问题
更多“要确定立体模型在地面测量坐标系中的正确位置,则需要把相对定向所建立的立体模型进行平移、旋转和缩放,以便纳入到地面测量坐标系中,并归化到制图比例尺,这一过程称为 ()。”相关的问题
第2题
A.建立的立体几何模型的空间方位和比例尺都是任意的;
B.目的是建立立体几何模型,需要依靠控制点进行;
C.通过消除标准点位上的同名像点的左右视可差以,完成相对定向;
D.通过解求相对定向元素,求得模型点在像空间辅助坐标系中的坐标。
E. 通过解求相对定向元素,求得模型点在地面坐标系中的坐标。
第3题
A、航带法空中三角测量
B、独立模型法区域网空中三角测量
C、光束法区域网空中三角测量
第4题
A.相对定向、内定向
B.内定向、相对定向
C.外定向、相对定向
D.内定向、绝对定向
第7题
1.测量设备:
(1)测量机器人一台,测角精度 0.5",测距精度0.6mm+1ppm;
(2)原装高精度圆棱镜20只;
(3)能安置棱镜的“ L”形墙标20个,带“+”字刻划的测量标志2个;
(4)含球形棱镜的专用测量工件一套;
(5)30m钢卷尺一把;
2.作业流程
(1)厂房主轴线确定。在厂房长对称轴端点内侧1m位置的A、B点上,埋设带“+” 字刻划的测量标志, A、B的连线即为厂房主轴线;
(2)控制点埋设。在每面墙上埋设4~5个“L”形标志,所有的标志在水平面上大致均匀分布,在高度上错落有致, “L”形标志上安置棱镜作为控制点;
(3)控制点测量。利用测量机器人自动测量3个控制点三维坐标,观测 8测回;
(4)坐标变换。根据组装要求,选择合适的方向作为施工坐标系 X轴,将控制点坐标转换到施工坐标系中;
(5)自由设站。在合适位置安装测量机器人,选取适当的控制点,按自由设站法测定仪器坐标,并检查自由设站的精度;
(6)坐标放样;
(7)重复(5)~(6)步骤;
3.放样质量检测。重点检查安装设备上点与点、 点与线、点与面之间的相对关系,对大型圆孔检测圆心的位置及圆心到轴线的距离。
问题:
1.如何建立施工坐标系?简述坐标变换的目的和流程。
2.自由设站对控制点的数量和点位分布有什么要求?如何检查自由设站成果的可用性。
3.叙述检测圆心平面坐标的作业方法和流程。
第10题
1)工程概述
××核电二期工程是中国自行设计建造的大型商用压水堆核电项目,是国家重点工程。
总装机容量2×600MW,包括核岛、常规岛及BOP三部分,工程总占地面积365km2,总建筑面积175603m2。其厂址位于××省××县城西南约10km的××镇。在施工控制网建立前夕,现场土石方开挖及场地平整已完成,通视条件较好。厂区周边地带可供使用的测量控制点共有4个,为前期勘察时建立,点号分别为Ⅲ-15,Ⅲ17,Ⅲ-19和Ⅲ-20。现有的控制点虽基本上覆盖了施工厂区,但相互间距离太远,精度较低,数量也无法满足施工需要。因此,为保证工程建设需要,厂区应及时建立二期施工测量控制网。
2)施工控制网的布设要求
二期施工控制网采用三等平面控制网,高程控制网采用二等水准测量方法。建成后的二期施工控制网应同时满足以下条件:
(1)控制点的点位布置合理,其精度及数量应满足工程建设的需要。
(2)控制点间应保持良好的通视条件,每一控制点应有两个以上控制点与之相互通视。
(3)控制点应稳定可靠,施工期内不发生自身的位移、沉降变形。
(4)为方便施工,施工控制网一般采用独立坐标系和自由边角网,以保证控制网的相对定位精度。
3)平面控制网观测方案选择
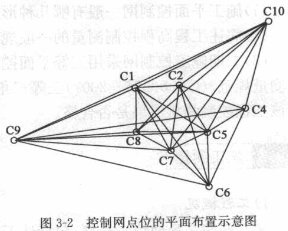
(1)平面控制网网形
为便于工程建筑的安装施工,二期施工控制网采用独立工程坐标系。为保证控制网的相对精度,控制网采用自由边角网,其网形如图3-2所示。其中,起算点C1由原首级网的Ⅲ-17、Ⅲ19、Ⅲ20三点(成果为1980西安坐标系),通过三角形插点的方法确定,同时以C1为测站点,与首级网联测C1-C10的方位角,作为控制网的起算方位角。
(2)平面控制网观测仪器的选用
从施工控制网的精度确定可以看到,由于控制网的测角及测边精度要求都很高,观测难度较大,同时考虑到在工程建设中,还要依据施工控制网建立精度更高的安装基准点及进行局部高精度的施工放样工作,因此本工程选用了精度相对较高的TCA2003全站仪,其测角精度为0.5’’,测距标称精度为1mm+1ppm×D。
(3)控制网观测测回数的确定
二期工程施工控制网角度观测测回数是根据实际采用的仪器精度、现场控制点布设特点,
以及角度和边长测量应达到的精度,并参考《工程测量规范》(GB50026-2007)中二、三等三角测量测角中误差及测回数确定原则确定的。本施工控制网角度及边长观测测回数均定为测回,其中边长观测要进行往返观测。
4)高程控制网的布设与精度确定
与平面控制点相比,高程控制点具有相对独立性。二期工程高程控制网以远离施工区的
原首级控制点Ⅳ27号点为起算点(成果为1985国家高程基准),布设一条二等闭合水准路线,以保证安装施工及厂区变形观测的精度要求。测量仪器采用WILDN3+线条式因瓦合金水准尺。按《工程测量规范》(GB50026-2007)中二等水准测量规定实施,进行分段往返观测。
5)平面控制网的外业观测及平差结果
二期施工控制网共计观测了77个三角形,最大闭合差-5.51",最小0.02",平均闭合差1.78",按菲列罗公式计算的三角形测角中误差mβ=±1.3"。测距边共计32条,测距中误差md=0.73mm,最弱边边长相对中误差为1/134000。
在控制网各外业观测完毕,且观测值满足各项观测限差后,即可进行控制网平差计算。平差结果:测角中误差mβ=1.09",测距中误差md=0.96mm,最大点位中误差m p=1.5mm,最小点位中误差m p =0.5mm,平均点位中误差mp=0.8mm。
6)高程控制网外业观测及平差结果
与平面控制网相比,高程控制网外业观测及数据处理较为简单。高程控制网外业观测共分9段,往返测最大较差-1.01mm,最小较差为0mm,往返测平均较差为0.31mm。线路Cl-C8-C5-C4-C3-C2-Cl闭合差为0.38mm(线路长1.2km),每公里高差中数偶然中误差m-±0.46mm。
7)问题
(1)施工平面控制网一般有哪几种形式?简述工程控制测量平面控制网的布设原则。
(2)简述工程高程控制测量的一般规定。
(3)二期施工控制网采用三等平面控制网,高程控制网采用二等水准测量方法,请列出《工程测量规范》(GB50026-2007)三等三角形网测量限差要求和二等水准测量限差要求并判断该工程控制测量成果是否合格。