题目内容
(请给出正确答案)
题目内容
(请给出正确答案)
[单选题]
隧道施工过程中,需要设置自动监控系统并配合人工检查检测瓦斯,实行“一炮三检”制,其中无需进行人工检查的阶段是()。
A.装药前
B.装药后
C.放炮前
D.放炮后
 答案
答案
B、装药后
 请输入或粘贴题目内容
搜题
请输入或粘贴题目内容
搜题
 拍照、语音搜题,请扫码下载APP
题目内容
(请给出正确答案)
拍照、语音搜题,请扫码下载APP
题目内容
(请给出正确答案)
A.装药前
B.装药后
C.放炮前
D.放炮后
答案
B、装药后
 更多“隧道施工过程中,需要设置自动监控系统并配合人工检查检测瓦斯,实行“一炮三检”制,其中无需进行”相关的问题
更多“隧道施工过程中,需要设置自动监控系统并配合人工检查检测瓦斯,实行“一炮三检”制,其中无需进行”相关的问题
第1题
技术员甲认为全断面开挖发的特点是工作空间较小、施工速度快、便于施工组织和管理;且全断面开挖法具有较小的断面进尺比,每次爆破震动强度较小,爆破对围岩的震动次数少,有利于围岩的稳定。考虑到该隧道地质情况与进度要求,所以该隧道应采用全断面开挖。同时针对该隧道采用的新奥法施工,提出了“勤测量、紧封闭”的基本原则。
隧道施工过程中为防止发生塌方冒顶事故,项目部加强了施工监控量测,量测项目有地质和支护状况,锚杆或锚索内力及抗拔力、地表下沉、围岩体内位移、支护及衬砌内应力。
项目部还实行安全目标管理,采取了一系列措施,要求进入隧道施工现场的所有人员必须经过专门的安全知识教育,接受安全技术交底;电钻钻眼应检查把手胶套的绝缘是否良好,电钻工应戴棉纱手套,穿绝缘胶鞋;爆破作业人员不能着化纤服装,炸药和雷管分别装在带盖的容器内用汽车一起运送;隧道开挖及衬砌作业地段的照明电器电压为l10~220 V。同时加强瓦斯等有毒有害气体的防治,通风设施由专职安全员兼管。
隧道施工完成后,进行了供配电、照明系统设施的安装,其中变压器为油浸变压器,由于工期延误,变压器运到现场100 d后才进行安装。电缆敷设在沟内时遵循了低压在上、高压在下的原则,敷设时还要求金属支架、导管必须接地(PE)或接零(PEN)可靠。
在交通监控方面,隧道由监控分中心统一监控,监控中心设有完善的子系统,包括交通信号监控系统、视频监控系统、供配电监控系统、隧道照明控制系统、调度指令电话系统、有线广播系统等。
问题
1.改正技术员甲对全断面开挖法特点阐述的错误之处。本项目采用新奥法施工还应遵
循的两条基本原则是什么?
2.补充本项目施工监控量测的必测项目,并指出隧道监控量测时出现冒顶塌方的危险信号(征兆)有哪些。
3.指出并改正项目部安全管理措施中的错误。
4.根据背景资料,油浸变压器安装前应做何处理?指出并改正电缆敷设的错误之处。
5.除背景资料中给出的监控子系统外,还应有哪些监控子系统?(至少列出三种)
第2题
第3题
A.隧道监控应按现行《铁路隧道监控量测技术规程》的规定建立等级管理、信息反馈制度
B.隧道监控量测应作为关键工序纳人现场施工组织
C.监控量测必须设置专职人员并经培训后上岗
D.对周边建筑物可能产生严重影响的城市铁路隧道,应实施第三方监测
E.监控量测工作必须紧接开挖、支护作业,按设计要求进行布点和监测,并根据现场情况及时进行调整量测的项目和内容
第4题
 安装公司进场施工时,又收到业主的设计变更图纸,安装公司采用综合单价法对工程量变更情况进行查对,发现分部分项工程量清单中的工程量增幅大于原工程量的20%,安装公司向业主提出了费用调整。在施工过程中,由于某些设计给施工带来困难,安装公司向业主提出修改设计要求,并增加了施工费用。 问题: 1.安装公司采用综合单价法编制施工图预算的条件是什么? 2.因设计变更引发工程量增加,安装公司能否向业主提出费用调整? 3.安装公司如何计算由于设计变更引起的新项目费用? 4.增加工程量的综合单价应如何调整? 5.通风空调设备系统调试检测有何要求?
安装公司进场施工时,又收到业主的设计变更图纸,安装公司采用综合单价法对工程量变更情况进行查对,发现分部分项工程量清单中的工程量增幅大于原工程量的20%,安装公司向业主提出了费用调整。在施工过程中,由于某些设计给施工带来困难,安装公司向业主提出修改设计要求,并增加了施工费用。 问题: 1.安装公司采用综合单价法编制施工图预算的条件是什么? 2.因设计变更引发工程量增加,安装公司能否向业主提出费用调整? 3.安装公司如何计算由于设计变更引起的新项目费用? 4.增加工程量的综合单价应如何调整? 5.通风空调设备系统调试检测有何要求?
第5题
A、掌握围岩和支护的动态信息并及时反馈,指导施工作业
B、通过对围岩和支护的变位、应力量测,修改支护系统设计
C、分析各项量测信息,确认或修正设计参数
D、为隧道施工研究提供科学数据
第6题
1)工程概况
××市××大厦基坑北侧与××地铁1号线隧道相邻,最近水平距离约9m。为了确保基坑支护顺利施工,保证××市地铁1号线正常运营,需对地铁1号线隧道进行变形监测,实时了解和掌握在基坑开挖过程中地铁隧道的变形情况,确保地铁隧道的安全。同时,可为基坑支护施工提供及时的反馈信息,为信息化施工提供科学的监测数据和报告。
××地铁1号线运营时间一般从早上6:00到晚上23:00,由于在运营时间测量人员无法下隧道测量,只能在夜间停运后测量。而白天是基坑施工的主要时间,也是监测的关键时间,因此,工程选择了基于自动全站仪开发的无接触式自动测量系统,实现了对运营地铁隧道结构三维变形位移的自动监测系统。
2)基准点及工作基点设置
(I)基准点的布设
监测区间线路离××车站及××车辆段均较近。本监测项目的基准点考虑选择在××车站内,选择采用有强制归心装置的观测墩。左出入段线和左线各设置3个基准点。为保证成果的可靠性,定期检测基准点的稳定性。
(2)工作基点的布设
为方便测量机器人自动搜寻目标,以及保证各监测点精度均匀,工作基站拟设置于监测范围中部的隧道侧墙上,托架伸出长度约400mm,左出入段线和左线各设置1个工作基点。基点网点可与地铁原基标控制系统联测或采用独立坐标系统。
(3)变形监测点的布设
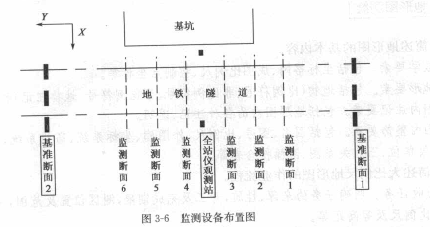
变形监测点设计要求的断面按每20m左右布设,每个断面在轨道附近的道床上布设2个监测点,即每个测断面布设2个监测点,全段线共布设6个观测断面。各断面观测点用连接件配小规格反射棱镜,用膨胀螺栓及云石胶锚固于监测位置的侧壁及道床的混凝土中,棱镜反射面指向工作基点,见图36。
3)测量机器人自动化监测
测量机器人自动化监测系统以基于1台测量机器人的有合作目标(照准棱镜)的变形监测系统为基本单元,可以由多个基本单元通过Internet联结起来组合而形成一个测量机器人远程网络监测系统,系统提供有线和无线两种组网方式。
(1)系统组成
远程无线遥控测量机器人变形监测和分析系统主要由3个单元组成:控制单元、无线通信单元和数据采集单元。控制单元一般安放在办公室内,通过具有固定lP的万维网发送指令和接收数据;无线通信单元与数据采集单元通过有线形式连接,将控制单元的指令转发给数据采集单元并将数据采集单元的数据简单处理后转发给控制中心;数据采集单元置于作业现场,根据控制单元的指令采集相应数据。
(2)硬件构成
远程无线遥控测量机器人变形监测和分析系统硬件主要由以下几项构成;
①测量机器人。测量机器人具有发动机驱动和目标自动识别等功能。测量机器人选用TS30,其静态测角精度为士0.5’’,测距精度为±(0.35mm+0.7ppm×D),自动目标识别的有效距离可达1000m,望远镜照准精度为2mm/500m。
②无线通信模块。实现系统控制中心与测量机器人之间的数据传输。
③系统控制中心。系统控制中心的主要任务之一是数据处理。
(3)软件构成
无线遥控测量机器人变形监测和分析系统软件主要由三部分组成:测量机器人机载软件、无线通信软件模块和控制中心软件包。
4)监测数据处理
测量机器人自动监测系统是根据全站仪的极坐标三维测量原理。由于该工程测量范围小,两端基准点之间的距离为150m左右,同时列车的运行,使得测量区域内的各点的气象条件较为一致。因此,通过一定的观测数据处理方法,可以消除由于不同测量周期测量时的气象变化所引起的测量误差。
5)小结
基于测量机器人的自动化监测系统,具有简便灵活、无人值守、实时动态的监测特点,克服了传统测量方法的不足,极大地提高了工作效率。监测系统为基坑开挖提供了准确、及时的地铁隧道变形数据,是运营地铁隧道变形监测的理想手段。随着我国城市地铁建设的大规模进行,自动监测已经成为必不可少的一种测量手段,发挥着日益重要的作用,随着地铁的发展,监测系统的前景应该不断发展和完善。
6)问题
(1)简述变形测量实施的程序与要求。
(2)简述全站仪自动跟踪测量的主要技术要求。
(3)监测项目的变形分析有哪些内容?
第7题
第8题
第9题
施工单位将路段中间K25+000右侧的齐土场硬化后,作为沥青混凝土拌和站场地,并配置了一套4000型间歇式沥青混凝土拌和设备。该设备主要指标如下:每拌制一份料的重量Gi=4000kg,每份料的加料时间t1=15秒,每份料的扦料时间t2=20秒,每份成品料卸料时间t3=13秒,时间利用系数KB=0.85。施工单位同时配置了两台11m 宽的超大型摊铺机,4台YZC双钢轮振动压路机及两台16T的xP胶轮压路机。
路面施工过程中,施工单位对上面层的压实十分重视,确定了质量控制关键点,并就压实工序做出如下书面要求:
①初压采用双钢轮振动压路机静压1-2遍,初压开始温度不低于140℃:
②复压采用双钢轮振动压路机振压4遍,复压初始温度不低于130℃;
⑧终压采用胶轮压路机静压1~2遍,终压结束温度不低于120'C:
④相邻碾压重叠宽度应大于30cm
⑤为保证沥青混合料碍压过程中不粘轮,应采用洒水车及时向混合料洒水。
改性SMA路面试验路段施工中,发现大量油斑。施工单位技术员分析后认为产生油斑的原因可能是:运输距离较远,SMA混合料中骨料与沥青产生离析;拌和时间太短,导致拌和不够充分:拌合料(特别是纤维掺加剂)及路表含有一定的水份等,经采取措施处理后,路面施工正常进行.
路面工程全部完工并验收后,施工单位进行了交通工程收费系统的施工,两周后,收费站出口车道的自动栏杆、通行信号灯等单机(体)设备安验及配线施工完毕。
收费系统全部施工完毕交付使用后,某收费站发生如下事件:
事件—:收费亭内收费员由于要核对某车辆信息,需与收费站监控值班员直接通话.
事件二:某日深夜,有歹徒袭击收费亭,收费员遭遇人身威胁。
问题
计算沥青混凝土拌和设备的生产率(Qi).(列出计算过程)
第10题
A.掌握围岩和支护的动态信息并及时反馈,指导施工作业
B.通过对围岩和支护的变位、应力量测,修改支护系统设计
C.分析各项量测信息,确认或修正设计参数
D.为理论解析、数值分析提供计算依据与对比指标
E.为地下工程设计与施工积累经验资料