题目内容
(请给出正确答案)
题目内容
(请给出正确答案)
[主观题]
集自动测距、测角、计算和数据自动记录及传输功能于一体的自动化、数字化及智能化的三维坐标测量与
定位系统的是()。
A.全站仪
B.电磁波测距仪
C.全球定位系统
D.经纬仪
 答案
答案
查看答案
 请输入或粘贴题目内容
搜题
请输入或粘贴题目内容
搜题
 拍照、语音搜题,请扫码下载APP
题目内容
(请给出正确答案)
拍照、语音搜题,请扫码下载APP
题目内容
(请给出正确答案)
A.全站仪
B.电磁波测距仪
C.全球定位系统
D.经纬仪
答案
 更多“集自动测距、测角、计算和数据自动记录及传输功能于一体的自动化、数字化及智能化的三维坐标测量与”相关的问题
更多“集自动测距、测角、计算和数据自动记录及传输功能于一体的自动化、数字化及智能化的三维坐标测量与”相关的问题
第3题
20分)
某水电站大坝长约500m、坝高约85m。在大坝相应位置安置了相关的仪器设备,主要包括引张线、正垂线/倒垂线、静力水准仪和测量机器人等四类设备,以便于对大坝进行变形监测,保证大坝运行安全。
设备的安置情况如下:
(1)在大坝不同高程的廊道内布设了若干条引张线;
(2)在坝段不同位置布设了若干个正垂线和倒垂线;
(3) 在坝段不同位置安置了若干台静力水准仪;
(4)现场安置了一套测量机器人自动监测系统。
在坝体下游400m处的左右两岸各有一已知坐标的基岩GPS控制点,控制点上有强制对中盘,在左岸基岩GPS控制点A上架设一台测量机器人(测角精度0.5秒,测距精度0.5mm+1ppm,单棱镜测程1km),在右岸基岩GPS控制点B上安置一圆棱镜。为了使用测量机器人自动监测大坝变形,在大坝下游一侧的坝体不同高程面上安置了一批圆棱镜作为变形监测的观测目标。系统自动监测前首先进行学习测量,然后按设定的周期自动观测,并实时将测量结果传输到变形监测管理系统。在每个周期测量中,各测回都首先自动照准B点,并获取距离、水平读盘和垂直度盘读数。
问题:
1、安置于大坝上的四类设备的观测结果分别是什么?
2、在每个周期测量中,各测回为什么都要首先自动照准B点,并获取距离、水平度盘和垂直度盘读数?
3、测量机器人学习测量的目的是什么?说明学习测量的详细步骤。
第7题
1)工程概述
××核电二期工程是中国自行设计建造的大型商用压水堆核电项目,是国家重点工程。
总装机容量2×600MW,包括核岛、常规岛及BOP三部分,工程总占地面积365km2,总建筑面积175603m2。其厂址位于××省××县城西南约10km的××镇。在施工控制网建立前夕,现场土石方开挖及场地平整已完成,通视条件较好。厂区周边地带可供使用的测量控制点共有4个,为前期勘察时建立,点号分别为Ⅲ-15,Ⅲ17,Ⅲ-19和Ⅲ-20。现有的控制点虽基本上覆盖了施工厂区,但相互间距离太远,精度较低,数量也无法满足施工需要。因此,为保证工程建设需要,厂区应及时建立二期施工测量控制网。
2)施工控制网的布设要求
二期施工控制网采用三等平面控制网,高程控制网采用二等水准测量方法。建成后的二期施工控制网应同时满足以下条件:
(1)控制点的点位布置合理,其精度及数量应满足工程建设的需要。
(2)控制点间应保持良好的通视条件,每一控制点应有两个以上控制点与之相互通视。
(3)控制点应稳定可靠,施工期内不发生自身的位移、沉降变形。
(4)为方便施工,施工控制网一般采用独立坐标系和自由边角网,以保证控制网的相对定位精度。
3)平面控制网观测方案选择
(1)平面控制网网形
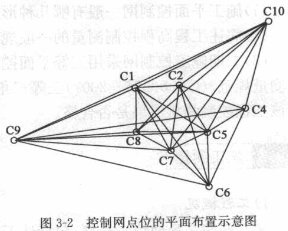
为便于工程建筑的安装施工,二期施工控制网采用独立工程坐标系。为保证控制网的相对精度,控制网采用自由边角网,其网形如图3-2所示。其中,起算点C1由原首级网的Ⅲ-17、Ⅲ19、Ⅲ20三点(成果为1980西安坐标系),通过三角形插点的方法确定,同时以C1为测站点,与首级网联测C1-C10的方位角,作为控制网的起算方位角。
(2)平面控制网观测仪器的选用
从施工控制网的精度确定可以看到,由于控制网的测角及测边精度要求都很高,观测难度较大,同时考虑到在工程建设中,还要依据施工控制网建立精度更高的安装基准点及进行局部高精度的施工放样工作,因此本工程选用了精度相对较高的TCA2003全站仪,其测角精度为0.5’’,测距标称精度为1mm+1ppm×D。
(3)控制网观测测回数的确定
二期工程施工控制网角度观测测回数是根据实际采用的仪器精度、现场控制点布设特点,
以及角度和边长测量应达到的精度,并参考《工程测量规范》(GB50026-2007)中二、三等三角测量测角中误差及测回数确定原则确定的。本施工控制网角度及边长观测测回数均定为测回,其中边长观测要进行往返观测。
4)高程控制网的布设与精度确定
与平面控制点相比,高程控制点具有相对独立性。二期工程高程控制网以远离施工区的
原首级控制点Ⅳ27号点为起算点(成果为1985国家高程基准),布设一条二等闭合水准路线,以保证安装施工及厂区变形观测的精度要求。测量仪器采用WILDN3+线条式因瓦合金水准尺。按《工程测量规范》(GB50026-2007)中二等水准测量规定实施,进行分段往返观测。
5)平面控制网的外业观测及平差结果
二期施工控制网共计观测了77个三角形,最大闭合差-5.51",最小0.02",平均闭合差1.78",按菲列罗公式计算的三角形测角中误差mβ=±1.3"。测距边共计32条,测距中误差md=0.73mm,最弱边边长相对中误差为1/134000。
在控制网各外业观测完毕,且观测值满足各项观测限差后,即可进行控制网平差计算。平差结果:测角中误差mβ=1.09",测距中误差md=0.96mm,最大点位中误差m p=1.5mm,最小点位中误差m p =0.5mm,平均点位中误差mp=0.8mm。
6)高程控制网外业观测及平差结果
与平面控制网相比,高程控制网外业观测及数据处理较为简单。高程控制网外业观测共分9段,往返测最大较差-1.01mm,最小较差为0mm,往返测平均较差为0.31mm。线路Cl-C8-C5-C4-C3-C2-Cl闭合差为0.38mm(线路长1.2km),每公里高差中数偶然中误差m-±0.46mm。
7)问题
(1)施工平面控制网一般有哪几种形式?简述工程控制测量平面控制网的布设原则。
(2)简述工程高程控制测量的一般规定。
(3)二期施工控制网采用三等平面控制网,高程控制网采用二等水准测量方法,请列出《工程测量规范》(GB50026-2007)三等三角形网测量限差要求和二等水准测量限差要求并判断该工程控制测量成果是否合格。
第9题
全站仪的主要技术指标有最大测程、测角精度、放大倍率和()
A.最小测程
B.缩小倍率
C.自动化和信息化程度
D.测距精度