题目内容
(请给出正确答案)
题目内容
(请给出正确答案)
[多选题]
由每次下落采集的距离和时间对组成观测方程,解算出落体下落初始位置高度处的观测重力值g,绘制下落结果直方图,进行()改正,并将重力值g,进行观测高度改正,分别归算至离墩面1.3m和墩面。
A.固体潮改正
B.气压改正
C.极移改正
D.光速有限改正
E.误差改正
 答案
答案
查看答案
 请输入或粘贴题目内容
搜题
请输入或粘贴题目内容
搜题
 拍照、语音搜题,请扫码下载APP
题目内容
(请给出正确答案)
拍照、语音搜题,请扫码下载APP
题目内容
(请给出正确答案)
A.固体潮改正
B.气压改正
C.极移改正
D.光速有限改正
E.误差改正
答案
 更多“由每次下落采集的距离和时间对组成观测方程,解算出落体下落初始位置高度处的观测重力值g,绘制下”相关的问题
更多“由每次下落采集的距离和时间对组成观测方程,解算出落体下落初始位置高度处的观测重力值g,绘制下”相关的问题
第1题
1)滑坡体介绍
××滑坡体位于长江左岸,前缘高程139m,后缘高程400m,滑坡面积约30万m2。1954年该滑坡临江地带200m高程以下部分曾崩滑人江,之后每遇特大暴雨即有崩滑迹象。2002年以来,滑体300~400m高程地段出现多条横向裂缝,最长约100m,40余户农户被迫于2003年7月搬出。
2)滑坡GPS监测网布设
GPS监测网由基准网和变形网构成。首级网为监测系统的基准网,二级网由滑坡监测点组成。在基准网控制下,比较滑坡监测点各期观测量与首期观测值的坐标差值,即可判断滑坡稳定性。
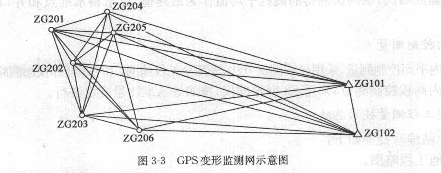
滑坡监测点根据滑坡体特点来选择,这些点要能反映滑坡体整体变形方向和变形量,又要能反映滑坡体范围变形速率。同时,每个点还要考虑接收卫星信号情况,测点上空不要有大面积遮挡物。为此,根据对现场条件的野外勘察,按照布网原则布设了如图3-3所示的GPS变形监测网。其中,ZG101~ZG102为布设在该滑坡体以外稳定基岩上的基准点,ZG201一ZG206为布设在本滑坡体外上的6个监测点。各点之间的平均距离为280.3m,最长距离为558.562m,最短距离为46.285m。基准点和监测点上都埋设了观测墩,并配有强制对中装置。
3)数据采集与数据处理
在对该滑坡进行监测过程中,分别在2008年9月和2008年11月对其进行了两期监测。
外业观测的仪器:基准点用2台双频GPS接收机,监测点用6台单频GPS接收机。观测方法:采用静态相对定位的方法进行野外数据采集,数据采样率为15s。观测时,基准点上观测3个时段,每时段4h;监测点上连续观测2h。
观测完毕后,利用随机软件进行解算。数据的解算包括闭合环的检验和GPS网平差等。
本监测网两期观测数据经约束平差后的各项精度指标都能达到预期目标,在精度、可靠性和置信度三个方面均达到了预期的设计要求。
4)监测结果分析
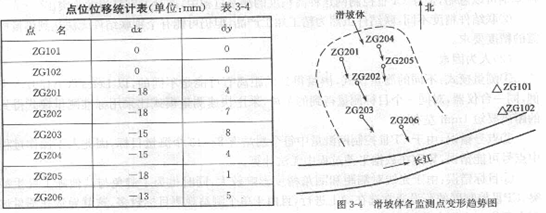
得到滑坡监测点两期观测坐标后,可得到该滑坡两期变形信息,统计结果如表3-4所示。
从表3-4中数据可以看出:该滑坡的6个监测点均发生了不同程度的变形,其中变形最大的位移点为ZG202(dx=-18mm,dy=7mm)。同时,由图3-4可以看出该滑坡6个监测点的变形方向基本一致(与长江水流方向垂直),有向南滑动的趋势。
5)问题
(1)变形监测有哪些方法?
(2)简述滑坡监测变形观测点位的布设规定。
(3)变形观测资料分析的常用方法有哪些?
(4)出现何种异常情况应即刻通知建设单位、施工单位和有关管理部门?
第3题
1)工程概况
××市××大厦基坑北侧与××地铁1号线隧道相邻,最近水平距离约9m。为了确保基坑支护顺利施工,保证××市地铁1号线正常运营,需对地铁1号线隧道进行变形监测,实时了解和掌握在基坑开挖过程中地铁隧道的变形情况,确保地铁隧道的安全。同时,可为基坑支护施工提供及时的反馈信息,为信息化施工提供科学的监测数据和报告。
××地铁1号线运营时间一般从早上6:00到晚上23:00,由于在运营时间测量人员无法下隧道测量,只能在夜间停运后测量。而白天是基坑施工的主要时间,也是监测的关键时间,因此,工程选择了基于自动全站仪开发的无接触式自动测量系统,实现了对运营地铁隧道结构三维变形位移的自动监测系统。
2)基准点及工作基点设置
(I)基准点的布设
监测区间线路离××车站及××车辆段均较近。本监测项目的基准点考虑选择在××车站内,选择采用有强制归心装置的观测墩。左出入段线和左线各设置3个基准点。为保证成果的可靠性,定期检测基准点的稳定性。
(2)工作基点的布设
为方便测量机器人自动搜寻目标,以及保证各监测点精度均匀,工作基站拟设置于监测范围中部的隧道侧墙上,托架伸出长度约400mm,左出入段线和左线各设置1个工作基点。基点网点可与地铁原基标控制系统联测或采用独立坐标系统。
(3)变形监测点的布设
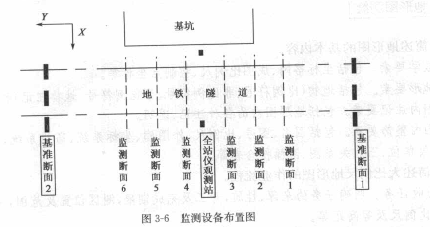
变形监测点设计要求的断面按每20m左右布设,每个断面在轨道附近的道床上布设2个监测点,即每个测断面布设2个监测点,全段线共布设6个观测断面。各断面观测点用连接件配小规格反射棱镜,用膨胀螺栓及云石胶锚固于监测位置的侧壁及道床的混凝土中,棱镜反射面指向工作基点,见图36。
3)测量机器人自动化监测
测量机器人自动化监测系统以基于1台测量机器人的有合作目标(照准棱镜)的变形监测系统为基本单元,可以由多个基本单元通过Internet联结起来组合而形成一个测量机器人远程网络监测系统,系统提供有线和无线两种组网方式。
(1)系统组成
远程无线遥控测量机器人变形监测和分析系统主要由3个单元组成:控制单元、无线通信单元和数据采集单元。控制单元一般安放在办公室内,通过具有固定lP的万维网发送指令和接收数据;无线通信单元与数据采集单元通过有线形式连接,将控制单元的指令转发给数据采集单元并将数据采集单元的数据简单处理后转发给控制中心;数据采集单元置于作业现场,根据控制单元的指令采集相应数据。
(2)硬件构成
远程无线遥控测量机器人变形监测和分析系统硬件主要由以下几项构成;
①测量机器人。测量机器人具有发动机驱动和目标自动识别等功能。测量机器人选用TS30,其静态测角精度为士0.5’’,测距精度为±(0.35mm+0.7ppm×D),自动目标识别的有效距离可达1000m,望远镜照准精度为2mm/500m。
②无线通信模块。实现系统控制中心与测量机器人之间的数据传输。
③系统控制中心。系统控制中心的主要任务之一是数据处理。
(3)软件构成
无线遥控测量机器人变形监测和分析系统软件主要由三部分组成:测量机器人机载软件、无线通信软件模块和控制中心软件包。
4)监测数据处理
测量机器人自动监测系统是根据全站仪的极坐标三维测量原理。由于该工程测量范围小,两端基准点之间的距离为150m左右,同时列车的运行,使得测量区域内的各点的气象条件较为一致。因此,通过一定的观测数据处理方法,可以消除由于不同测量周期测量时的气象变化所引起的测量误差。
5)小结
基于测量机器人的自动化监测系统,具有简便灵活、无人值守、实时动态的监测特点,克服了传统测量方法的不足,极大地提高了工作效率。监测系统为基坑开挖提供了准确、及时的地铁隧道变形数据,是运营地铁隧道变形监测的理想手段。随着我国城市地铁建设的大规模进行,自动监测已经成为必不可少的一种测量手段,发挥着日益重要的作用,随着地铁的发展,监测系统的前景应该不断发展和完善。
6)问题
(1)简述变形测量实施的程序与要求。
(2)简述全站仪自动跟踪测量的主要技术要求。
(3)监测项目的变形分析有哪些内容?
第5题
第6题
A.IP地址
B.配置文件
C.驱动程序
D.采集日志
第7题
A.ES存储的基本单元是shard,index由多个shard组成,shard由多个segment组成
B.每次flush即生成一个segment,所以flush时间间隔越短,生成的segment大小越小
C.为避免存在大量小文件,ES会每60分钟自动进行segment合并
D.flush的默认间隔时间是30min
第8题
A.由硬件系统和软件系统两大部分组成
B.对医院及其所属各部门的人流、物流、财流进行综合管理
C.对在医疗活动各阶段产生的数据进行采集、存储、处理、提取、传输、汇总
D.为医院的整体运行提供全面的自动化管理
E.以上都对
第9题
作的时间之间是否存在替代关系。我们可以用它们中的任何一个作为因变量。为具体起见,估计模型
sleep=β0+β1totwrk+u
其中,sleep是每周用于晚上睡眠的分钟数,totwrk是这一周中用于工作的分钟数。
(Ⅰ)用方程的形式,连同观测的次数和R²报告你的结果。该方程中的截距表示什么?
(Ⅱ)若tot wrk增加2小时,则sleep估计要减少多少?你觉得这是一个很大的效应吗?